精密水准测量的实施
精密水准测量一般指国家一、二等水准测量,在各项工程的不同建设阶段的高程控制测量中,极少进行一等水准测量,故在工程测量技术规范中,将水准测量分为二、三、四等三个等级,其精度指标与国家水准测量的相应等级一致。
下面以二等水准测量为例来说明精密水准测量的实施。
精密水准测量作业的一般规定
在前一节中,分析了有关水准测量的各项主要误差的来源及其影响。根据各种误差的性质及其影响规律,水准规范中对精密水准测量的实施作出了各种相应的规定,目的在于尽可能消除或减弱各种误差对观测成果的影响。
( 1 )观测前 30 分钟,应将仪器置于露天阴影处,使仪器与外界气温趋于一致;观测时应用测伞遮蔽阳光;迁站时应罩以仪器罩。
( 2 )仪器距前、后视水准标尺的距离应尽量相等,其差应小于规定的限值:二等水准测量中规定,一测站前、后视距差应小于 1.0m ,前、后视距累积差应小于 3m 。这样,可以消除或削弱与距离有关的各种误差对观测高差的影响,如 i角误差和垂直折光等影响。
( 3 )对气泡式水准仪,观测前应测出倾斜螺旋的置平零点,并作标记,随着气温变化,应随时调整置平零点的位置。对于自动安平水准仪的圆水准器,须严格置平。
( 4 )同一测站上观测时,不得两次调焦;转动仪器的倾斜螺旋和测微螺旋,其最后旋转方向均应为旋进,以避免倾斜螺旋和测微器隙动差对观测成果的影响。
( 5 )在两相邻测站上,应按奇、偶数测站的观测程序进行观测,对于往测奇数测站按“后前前后”、偶数测站按“前后后前”的观测程序在相邻测站上交替进行。返测 时,奇数测站与偶数测站的观测程序与往测时相反,即奇数测站由前视开始,偶数测站由后视开始。这样的观测程序可以消除或减弱与时间成比例均匀变化的误差对 观测高差的影响,如i角的变化和仪器的垂直位移等影响。
( 6 )在连续各测站上安置水准仪时,应使其中两脚螺旋与水准路线方向平行,而第三脚螺旋轮换置于路线方向的左侧与右侧。
( 7 )每一测段的往测与返测,其测站数均应为偶数,由往测转向返测时,两水准标尺应互换位置,并应重新整置仪器。在水准路线上每一测段仪器测站安排成偶数,可以削减两水准标尺零点不等差等误差对观测高差的影响。
( 8 )每一测段的水准测量路线应进行往测和返测,这样,可以消除或减弱性质相同、正负号也相同的误差影响,如水准标尺垂直位移的误差影响。
( 9 )一个测段的水准测量路线的往测和返测应在不同的气象条件下进行,如分别在上午和下午观测。
( 10) 使用补偿式自动安平水准仪观测的操作程序与水准器水准仪相同。观测前对圆水准器应严格检验与校正,观测时应严格使圆水准器气泡居中。
( 11 )水准测量的观测工作间歇时,最好能结束在固定的水准点上,否则,应选择两个坚稳可靠、光滑突出、便于放置水准标尺的固定点,作为间歇点加以标记,间歇 后,应对两个间歇点的高差进行检测,测结果如符合限差要求(对于二等水准测量,规定检测间歇点高差之差应 ≤1.Omm ),就可以从间歇点起测。若仅能选定一个固定点作为间歇点,则在间歇后应仔细检视,确认没有发生任何位移,方可由间歇点起测。
精密水准测量观测
1、测站观测程序
往测时,奇数测站照准水准标尺分划的顺序为
- 后视标尺的基本分划;
- 前视标尺的基本分划;
- 前视标尺的辅助分划;
- 后视标尺的辅助分划;
往测时,偶数测站照准水准标尺分划的顺序为
- 前视标尺的基本分划;
- 后视标尺的基本分划;
- 后视标尺的辅助分划;
- 前视标尺的辅助分划。
返测时,奇、偶数测站照准标尺的顺序分别与往测偶、奇数测站相同。
按光学测微法进行观测,以往测奇数测站为例,一测站的操作程序如下:
( 1 )置平仪器。气泡式水准仪望远镜绕垂直轴旋转时,水准气泡两端影像的分离,不得超过 lcm ,对于自动安平水准仪,要求圆气泡位于指标圆环中央。
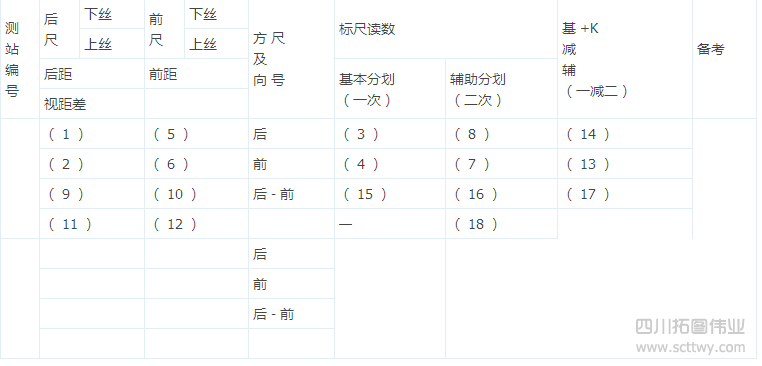
( 2 )将望远镜照准后视水准标尺,使符合水准气泡两端影像近于符合(双摆位自动安平水准仪应置于第 Ⅰ 摆位)。随后用上、下丝分别照准标尺基本分划进行视距读数(如表 5-2 中的( 1 )和( 2 ))。视距读取 4 位,第四位数由测微器直接读得。然后,使符合水准气泡两端影像精确符合,使用测微螺旋用楔形平分线精确照准标尺的基本分划,并读取标尺基本分划和测微分划 的读数( 3 )。测微分划读数取至测微器最小分划。
( 3 )旋转望远镜照准前视标尺,并使符合水准气泡两端影像精确符合(双摆位自动安平水准仪仍在第 Ⅰ 摆位),用楔形平分线照准标尺基本分划,并读取标尺基本分划和测微分划的读数( 4 )。然后用上、下丝分别照准标尺基本分划进行视距读数( 5 )和( 6 )。
( 4 )用水平微动螺旋使望远镜照准前视标尺的辅助分划,并使符合气泡两端影像精确符合(双摆位自动安平水准仪置于第Ⅱ摆位),用楔形平分线精确照准并进行标尺辅助分划与测微分划读数( 7 )。
( 5 )旋转望远镜,照准后视标尺的辅助分划,并使符合水准气泡两端影像精确符合(双摆位自动安平水准仪仍在第Ⅱ摆位),用楔形平分线精确照准并进行辅助分划与 测微分划读数( 8 )。表 5-2 中第( 1 )至( 8 )栏是读数的记录部分,( 9 )至( 18 )栏是计算部分,现以往测奇数测站的观测程序为例,来说明计算内容与计算步骤。
视距部分的计算
( 9 ) = ( 1 ) – ( 2 )
( 10 ) = ( 5 ) – ( 6 )
( 11 ) = ( 9 ) – ( 10 )
( 12 ) = ( 11 ) + 前站( 12 )
高差部分的计算与检核
( 14 )=( 3 ) + K – ( 8 )
式中 K 为基辅差(对于 N3 水准标尺而言 K=3.0155m)
( 13 ) = ( 4 ) + K – ( 7 )
( 15 ) = ( 3 ) – ( 4 )
( 16 ) = ( 8 ) – ( 7 )
( 17 ) = ( 14 ) – ( 13 ) = ( 15 ) – ( 16 )检核
( 18 ) = [ ( 15 ) + ( 16 ) ]
表 5-2
测自 至 19 年 月 日
时间 始 时 分 末 时 分 成 像
温度 云量 风向风速
天气 土质 太阳方向
以上即一测站全部操作与观测过程。一、二等精密水准测量外业计算尾数取位如表 5-3 规定。
表 5-3

表 5-2 中的观测数据系用 N3 精密水准仪测得的,当用 S1 型或 Ni 004 精密水准仪进行观测时,由于与这种水准仪配套的水准标尺无辅助分划,故在记录表格中基本分划与辅助分划的记录栏内,分别记入第一次和第二次读数。
2、水准测量限差(表 5-4)
表 5-4
若测段路线往返测高差不符值、附合路线和环线闭合差以及检测已测测段高差之差的限值如表 5-5 所示。
表 5-5

若测段路线往返测不符值超限,应先就可靠程度较小的往测或返测进行整测段重测;附合路线和环线闭合差超限,应就路线上可靠程度较小,往返测高差不符值较大或观测条件较差的某些测段进行重测,如重测后仍不符合限差,则需重测其他测段。
3、水准测量的精度
水准测量的精度根据往返测的高差不符值来评定,因为往返测的高差不符值集中反映了水准测量各种误差的共同影响,这些误差对水准测量精度的影响,不论其性质和变化规律都是极其复杂的,其中有偶然误差的影响,也有系统误差的影响。
根 据研究和分析可知,在短距离,如一个测段的往返测高差不符值中,偶然误差是得到反映的,虽然也不排除有系统误差的影响,但毕竟由于距离短,所以影响很微 弱,因而从测段的往返高差不符值 来估计偶然中误差,还是合理的。在长的水准线路中,例如一个闭合环,影响观测的,除偶然误差外,还有系统误差,而且这种系统误差,在很长的路线上,也表现 有偶然性质。环形闭合差表现为真误差的性质,因而可以利用环形闭合差 来估计含有偶然误差和系统误差在内的全中误差,现行水准规范中所采用的计算水准测量精度的公式,就是以这种基本思想为基础而导得的。
由 个测段往返测的高差不符值 计算每公里单程高差的偶然中误差(相当于单位权观测中误差)的公式为
( 5-5 )
往返测高差平均值的每公里偶然中误差为
( 5-6 )
式 中, 是各测段往返测的高差不符值,取 mm 为单位; R 是各测段的距离,取 km 为单位; 是测段的数目。( 5-6 )式就是水准规范中规定用以计算往返测高差平均值的每公里偶然中误差的公式,这个公式是不严密的,因为在计算偶然误差时,完全没有顾及系统误差的影响。顾 及系统误差的严密公式,形式比较复杂,计算也比较麻烦,而所得结果与( 5-6 )式所算得的结果相差甚微,所以( 5-6 )式可以认为是具有足够可靠性的。
按水准规范规定,一、二等水准路线须以测段往返高差不符值按( 5-6 )式计算每公里水准测量往返高差中数的偶然中误差 。当水准路线构成水准网的水准环超过 20 个时,还需按水准环闭合差 计算每公里水准测量高差中数的全中误差 。
计算每公里水准测量高差中数的全中误差的公式为
( 5-7 )
式 中, 是水准环线经过正常水准面不平行改正后计算的水准环闭合差矩阵, 的转置矩阵 为 环的闭合差,以 mm 为单位; 为水准环的数目,协因数矩阵 中对角线元素为各环线的周长 ,非对角线元素,如果图形不相邻,则一律为零,如果图形相邻,则为相邻边长度(公里数)的负值。
每公里水准测量往返高差中数偶然中误差 和 表 5-6
| 等级 | 一等 mm | 二等 mm |
| ≤0.45 ≤1.0 | ≤1.0 ≤2. |
全中误差 的限值列于表 5-6 中。
偶然中误差 ,全中误差 超限时,应分析原因,重测有关测段或路线。