
实时动态差分GPS(RTD/RTK)的发展及应用现状
时间:2012-10-22浏览: 次责任编辑:四川拓图测绘仪器
1、GPS测量主要误差有如下三项:
- 卫星时钟误基约2-15 m。
- 大气影响:包括电高层及对流层影响,约2-15 m。
- 选择可用性误羞SA),约100。
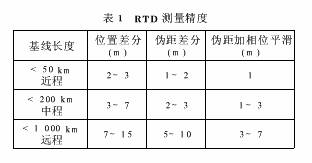
由于上述几个主要误差的存在,所以单点定位精度只能在 100 m左右。然而这些误差具有共同的特性,这就是在相距不远的(比如几十公里至几百公里)两台接收机同时对某卫星进行测量时,其误差对两台接收机的影响是相关 的。根据此原理,如果其中一台接收机置于己知位置的点上测量,则可以计算出误差值(也称校正值),将该校正值传送到另一台接收机,校正其测量值,因其误差 相关,所以该接收机最后测量结果,其主要误差基本消除,这就是常规动态差分GPS定位的基本原理。己知位置的接收机称基淮台(或参考台),其它台称移动 台。校正值由数据传输链发送给移动台。差分方式有位置差分及伪距差分两种,前者简单,精度稍差,后者是在伪距上进行校正。RTD的测量误差与基线长度(移 动台一基准台距高)成正比,如果经滤波或相位平滑,精度会进一步提高。
RTD测量精度见表1。
2、RTD主要系统组成
RTD由下列三部分组成:
- 基淮台卫星接收机及接收天线;
- 移动台卫星接收机及接收大线;
- 数据传输挽包括校正值处理乳数字调制解调器,数据发射机及数据接收机。系统组成如图1所示。

RTD系统使用的卫星接收机单频机就可队但要求接收通道要尽可能的多,基淮台要有10个以上接收通道,标淮配置是12个通道。这是为了能接收到所有通过的卫星,以保证其它移动台因环境差异不能接收到全部通过卫星时,仍能对应基淮台有4个以上卫星进行选择的可能忧
实施RTD的关键是数据传输链,基准台要将大量的信息传送到移动包差分定位精度的好坏与差分校正值的更新率与数据传输的准确性密切相关,因此对数据 链的要求是数据传输淮确可靠,速度快。一般要求数据传输的误码率应小于10’,差分数据的更新率应小于 10 S由于。SA”的影响,超过10 S校正值项的变化将明显增大而降低精度。
RTD现状及其应用
常规差分GPS定位技术目前己经相当成熟成熟的标志是:
1、系统精度稳定
由于关键技术部位的数据传输链的质量和可靠性均己达到较高的水平,采用了EDAC技术(错误检查和改正)。使数据传输的误码率很低。有的数据链采用 双频发射,以避免大气噪声干扰。目前 RTD的精度在1-10 m内是比较稳定的,可信度为 2S吗m a,即 96%的数据在这个范巴
2、系统产品齐全
RTD的产品从近程、中程、远程等系列产品相继投入应用,作用距离最远的可达到干公里,基本上覆盖了所有较远的海域。
3、设备轻便灵活
由于微电于及数据处理等一些高新技术的发展应用,目前的差分GPS设备不断换代,设备体积越来越小,重量越来越轻,移动台设备包括卫星接收机,校正 值接收机,调制解调器,可以完整地组装在一个箱体,其重量不过2- 3 kg。近程基淮台也非常轻便灵活,一个人lh就可以安装完成。即是比较笨重的远程基淮台,其电源、GPS接收机、解调器、数据发射机等也可以组装在一个机 柜中,加上接收及发射大线等设备一部车就可以搬走,两个工作人员两天可以安装调试完成。
RTD技术日趋完善可靠,其各项性能均优于传统的无线电定位系统,表2是简要对比。
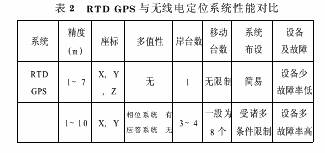
由于RTD GPS整个系统设备少,易管理,故障少,精度高,成本低,效益高等优点,所以各类无线电定位系统己逐渐被常规实时动态差分GPS所替代,目前RTD己广泛 应用于各个领域,特别是海上作业,如海洋物幌包括二维、三维地震勘探;井场调查、平台移位;工程管道铺设;水道测量
常规实时动态差分GPS是采用码相位测量,因此其精度不可能进一步提高,而巳三维坐标中的高程误差是水平误差的2倍,即高程误差在2- 15 m。这在某些要求三维坐标的作业,高程精度是难以满足要求的。
RTK一实时动态载波相位差分GPS
实时动态载波相位差分GPS测量是指在运动状态下通过跟踪处理接收卫星信号的载波相位,从而获得比RTD一常规差分GPS测量高得多的定位精度。为 了和常规的码相位差分GPS相区别,称实时动态载波相位差分GPS为RTK,也有称作RTK/OTF(RealTwie Kinematlyon The Fly)
RTK是在载波相位上进行测量,所以精度很高,可以达到几厘米或几分米的精度。这样高的精度其应用领域扩展到许多范围。然而,在动态情况下,实施相位测量有很大难度,主要是多值性,也就是如何求解初始整周未知数问题。
1、关键问题—一整周未知数
测量点P到任一卫星在t.时刻相应测量有下式:
![]()
式中为在t.时刻测量点到任一卫星间相位测量的相位数值;A甲为在t.时刻相应测量的小数值(l周内);N。为信号从岛时锁定到局时刻接收到达的 载波信号进行拍频计数的累计整周数;N。为在岛时刻前载波相位从卫星到测量点在空间传播的整周故A叩是瞬时可以测量到的值,N。是在相位锁定后可通过累计 得到,唯N。是个未知凯这是无法通过观测得到的值,称初始整周未知数,也称整周模糊度或多值性。
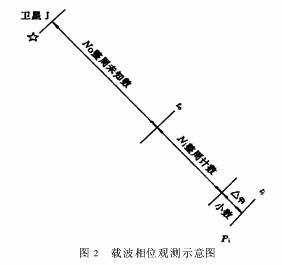
(1)式可以用图2表示。从(l)式和图2可知,要进行载波相位测量,必须解决整周未知数N。问题,在静态测量电可利用长时间观测和事后处理求解出N。,然而在动态下求解N。就非常困难。
2、求解整周未知数的方法
在运动状态下求解整周未知数叫无初始化相位测量。主要方法有:
(1)快速逼近法(FARA)
FARA门ast Am b吗ulty Resolutl。n Approach)法是以统计理论为依据,在某一估值的范围内搜索一组方差之和为最小的似然整周数解集。这种以统计方式求解整周未知数的方法速度快,阴加 条件少。估值是以常规差分方法得到的解值,所以常规码相位差分是基础,估值精度越高,求解的范围就越小,求解的速度就越快,准确性就越高。该方法的优点是 使用单频接收机就可以,缺点是需要一定的时间,需要几秒钟到几分钟才能完成初始化。
(2)组合波宽巷处理:
它的前提是必须采用双频接收机。仍然利用常规码相位差分测量,得到一个整周模糊度的近似估值,然后再对伪距噪声及多路径效应进行平滑,以减少整周数的搜索个数,最后根据双频信号,通过两种波长(巷宽)的线性组合,可以得到一个宽巷的巷宽。
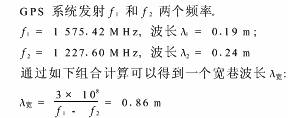
显然,宽巷的波长比单频的波长大4倍,利用宽巷极易在估值范围内求出巷宽的整周模糊度,再利用/和宽巷的参数间的线性关系求出/和整周未知故组合波法其优点是求解速度快,一般需几秒至十几秒时凤缺点是需配置双频接收机成本要高出单频机一倍。
RTK的发展及应用现状
实时动态载波相位测量是差分GPS测量技术的一大突破,它把实时动态下的定位精度提高到过去只能在静态测量中经过较长时间( l- 2 h)测量,而巳需要事后处理才能得到的精度—一几厘米或几分米。
由于 RTK GpS测量精度高,而巳是实时,无需事后处理,因此它己使当前GPS技术发展到最高点。它的应用领域己扩大到许多方面。
1、RTK突出的优点:
高精度:采用高性能双频机可达到2。m+2PPm x D,性能差的也可达到亚米级; 实时性能:在现场即可得到三维坐标,并能实时放样出设计坐泳
轻便灵活:设备都非常轻便,不包括电源基准台只有十多公斤,移动台只有几公斤,搬迁安装非常灵活。
2、应用领域:
地震测线放样,可以根据设计测线的检波点及炮点位置在实地确认。由于有很高的三维坐标精度,在陆地测量中,可以同时得到点位的平面位置和高程。
代替常规的GPS静态控制测量,因几厘米或几分米的精度可以满足一般工程测量中的控制精度要灰无需长时间静态测量事后处理。
高精度的工程测量:如航道测量,地形测图,道路工程等。
3、几种典型的RTK设备性能如表3所示。

4、RTK的局限性
(1)作用距离有限:
RTK测量在解算整周未知数时,需要一个近似的估值,该估值是以码相位常规差分测量求得的,作用距高太大时,该估值的误差就大,有可能在运动状态下 无法搜索到可靠的整周数解,导致作业失败,因此作用距高就非常有限,一般要得到厘米级精度作用距离不能大于 10- 15 km,要得到亚米级精度作用距高不能大于5 0 km,随着今后研究的深入和技术不断完善,作用距离可能放宽。
(2)初始化时间的等待:
在动态下求解整周模糊度—一即初始化需要一定时间(几秒到几分钟),因此在连续动态作业过程电一巳信号失锁,需要重新进行初始化,在初始化过程中,精度将降低到常规差分GPS的精度,只有等待初始化完成,精度才能恢复到原有的精度。
结束语
RTD作为海洋勘探的定位导航设备己经相当成熟,远程的RTD己能达到l- 5 m的精度,这时常规的二维,三维地震勘探是有保证的。
TRK以其厘米级的高精度和轻便灵活为优势,作为海滩及内陆湖泊等小区域物探作业极为有利。尤其陆地部分地震作业要求点位具有高程数据且误差不能大 于 2 m, RTK完全满足这些条件它的轻便灵活又为复杂地区随意搬迁安装提供了方便。我单位在新疆博湖地区作业,由于地区复杂,应答器系统使用了8个岸包4套移动包 外加经纬仪和红外线测距仪,如果使用一套RTK,就可以替代上述所有设备。不管从管理或效益上讲,尽快由RTK替代之是明智的选择。
信息标题:实时动态差分GPS(RTD/RTK)的发展及应用现状
本文地址:http://www.mapping178.com/zhichi-1286.html
阅读本文的人还看过:
与“实时动态差分GPS(RTD/RTK)的发展及应用现状”有关联的产品:




- 上一篇:无控制点用RTK定线定位
- 下一篇:南方山区土地利用GPS野外测量方法