
GPS非差相位精密单点定位技术
时间:2012-10-24浏览: 次责任编辑:四川拓图测绘仪器
在过去的10年里,GPS技术在大地测量领域得到广泛应用,从全球板块地壳运动监测、区域性的高等级控制网、城市差分连续运行系统到小范围的建筑物 变形监测,GPS都扮演着重要的角色。在这些应用中,一般都采用GPS相对定位的作业方式,通过组成双差观测值消除接收机钟差、卫星钟差等公共误差及削弱 对流层延迟、电离层延迟等相关性强的误差影响,来达到提高精度的目的。这种作业方式无需考虑复杂的误差模型,具有解算模型简单、定位精度高等优势。但也存 在一些不足,如作业时至少有一台接收机置于已知站上观测,影响了作业效率,提高了作业成本。另外,随着距离的增加,对流层延迟、电离层延迟等误差的相关性 减弱,必须相应地延长观测时间,才能达到预期精度。是否有新的作业方式,能克服GPS相对定位的这些缺点呢?1997年,美国喷气推进实验室(JPL)的Zumbeger等人提出了一种有效的解决方案,即非差精密单点定位方法。他们利用此方法处理单机静态观测一天的数据,其内符合精度在水平方向为几个 mm,高程方向为几个cm;处理全球动态数据的内符合精度在水平方向约为8cm,高程方向约为20cm[1,2]。另外,Hatch等人计划利用JPL提 供的实时精密定轨定位软件,发展一套水平方向定位精度约为10cm的全球实时精密定位系统(Global RTK)[3]。由于此方法可利用单台接收机在全 球范围内静态或动态独立作业,并且直接得到高精度的ITRF框架坐标,因此,它在高精度的坐标框架维持及区域性或全球性的科学考察及低轨卫星定轨等方面都 具有不可估量的前景。
精密单点定位方法
传统GPS单点定位是指利用伪距及广播星历的卫星轨道参数和卫星钟差改正进行定位。由于伪距(即使是P码伪距)的观测噪声至少也有几十cm,广播星 历的轨道精度为几m,卫星钟差改正精度为几十ns,因此这种单点定位的坐标分量精度只能达到10m级(P码单点定位精度约为3m),仅能满足一般的导航定 位需求。而精密单点定位是先利用全球若干IGS跟踪站数据计算出精密卫星轨道参数和卫星钟差,再利用所求得的卫星轨道参数和卫星钟差,对单台接收机采集的 相位和伪距观测值进行非差定位处理。
为了达到dm级甚至cm级(比传统GPS单点定位高数十倍甚至数百倍)的定位精度,精密单点定位有如下关键之处:
- 在定位过程中需同时采用相位和伪 距观测值;
- 卫星轨道精度需达到几cm水平;
- 卫星钟差改正精度需达到亚ns量级;
- 需考虑更精确的其他误差改正模型。
根据上述分析,精密单点定位需解决 如何确定非差相位整周模糊度、高精度的卫星轨道确定及高精度的卫星钟差改正估计等问题。由于精密卫星钟差改正估计问题较为复杂,笔者将另文阐述。另 外,IGS目前提供的卫星精密星历精度为35cm,精密单点定位可采用直接内插IGS卫星精密星历的方法得到卫星轨道参数,然后利用它与若干个IGS跟踪 站数据进行卫星钟差估计,再进行非差精密单点定位。此方法既避免了复杂的定轨计算,又可以很方便地估计所需采样率的卫星钟差(仅受IGS跟踪站数据采样率 的限制),因此有更强的实际应用价值。
1、数学模型在精密单点定位中,本文方法是利用钟差估计值消去卫星钟差项,并且采用双频观测值消除了电离层影响,其观测值误差方程如下:
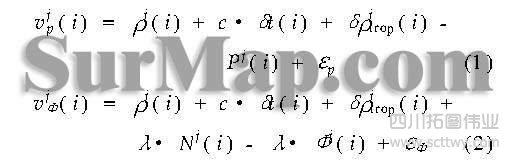
式中,j为卫星号;i为相应的观测历元;C为真空中光速;δt(i)为接收机钟差;δρjtrop为对流层延迟影响;εp、εΦ为多路径、观测噪声 等未模型化的误差影响;pj(i)、Φj(i)为相应卫星i历元的消除了电离层影响的组合观测值,而vjp(i)、vjΦ(i)为其观测误差,λ为相应的 波长;ρj(i)为信号发射时刻的卫星位置到信号接收时刻接收机位置之间的几何距离;nj(i)为消除电离层影响的组合观测值的整周未知数。
式中,A为相应的设计矩阵;L(i)为相应的观测值减去概略理论计算值得到的常数项;X(i)为待估计参数;X、Y、Z为三维位置参数;δt为接收机钟差参数;δρjtrop为对流层延迟参数;NJ为整周未知数参数,j=1,2,…,n。
在解算时,位置参数在静态情况下可以作为常未知数处理;在未发生周跳或修复周跳的情况下,整周未知数当作常数处理;在发生周跳的情况下,整周未知数 当作一个新的常数参数进行处理。由于接收机钟较不稳定,且存在着明显的随机抖动,因此将接收机钟差参数当作白噪声处理;而对流层影响变化较为平缓,可以先 利用saastamonen或其他模型改正,再利用随机游走的方法估计其残余影响。单历元数据可以采用最小二乘法解算得到最后结果,多个历元数据可以采用 序贯最小二乘法或卡尔曼滤波的方法进行解算。
2、精密单点定位的误差改正在精密单点定位中,除了考虑电离层、对流层等误差影响外,还要考虑卫星天线相位中心偏差、固体潮、海洋负荷的影响。
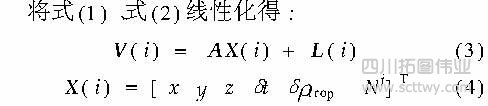
卫星天线相位中心偏差改正由于GPS卫星定轨时利用的力模型都是对应卫星质心的,因此在IGS精密星历中卫星坐标及卫星钟差都是相应于 卫星质心而不是相应于卫星天线相位中心的,而GPS观测值是相应于卫星天线相位中心和接收机天线相位中心的。一般来说,卫星天线相位中心与卫星质心并不重 合,在精密单点定位中,不能利用差分的方法消除或减弱其影响,因此必须考虑其改正模型。在星固系中,卫星相位中心相对于卫星质心的偏差如表1所示。
固体潮改正
固体潮与海洋潮汐产生的原因相同。天体(太阳、月球)对弹性地球的引力作用,使地球固体表面产生周期性的涨落,且使地球在地心与天体的连线方向上拉 长,在与连线垂直方向上趋于扁平,由和纬度相关的长期项与周期分别为0.5d和1d的周期项组成。在GPS双差相对定位中,对于短基线 (<100km)其影响可以不考虑,对于数千km的长基线,有几cm的误差,精密处理中需要考虑。对于精密非差单点定位,由于不能利用站间差分的方 法消除,其影响在径向大约有30cm,在水平方向约有5cm[4],必须利用模型加以改正。
海洋负荷改正
海洋负荷对精密单点定位的影响结果与固体潮的一致,但比固体潮小一个量级。海洋负荷主要由日周期与半日周期部分组成。对于单历元,定位精度要求亚m 级或24h观测时间的cm级静态定位,可以不考虑海洋负荷的影响。对于亚m级动态定位或观测时间短于24h的cm级静态定位,必须顾及海洋负荷的影响,除 非测站远离海岸线(>1000km[4]。
计算及结果分析
1、数据处理方法
精密单点定位计算过程主要分如下几个步骤:①为了方便计算,将精密星历拟合成多项式形式;②精密星历每15min给定一个卫星钟差值,这个间隔不能 满足精密单点定位要求,又由于卫星钟差的变化较快而不能直接以30s为间隔对其进行线性内插,必须利用多个IGS跟踪站GPS观测数据与精密星历估计得到 30s历元间隔的卫星钟差;③利用拟合的轨道多项式及卫星钟差与用户站观测数据一起进行精密单点定位计算。
2、 数据预处理
在精密单点定位中,必须先进行清除周跳和相位平滑伪距等数据预处理工作,以得到高质量的非差相位和伪距观测值。
(1) 组合观测值修复周跳
在精密单点定位中,清除非差GPS观测数据中的周跳是一项重要的工作。由于非差单点定位只有单站数据能利用,无法组成双差或三差观测值,一般消除周 跳的方法如三差法、多项式拟合法并不适用。而Blewitt提出的利用双频双p码组合观测值修复周跳的方法很适合清除非差周跳[5]。用于清除非差周跳的 GPS观测值线性组合有以下几种。


Melbourne_wubbena组合消除了电离层、对流层、钟差和计算的几何观测值的影响,而且具有较长的波长、较小的量测噪声等特点,因此适 用于非差周跳的探测和修复。如果Melbourne_wubbena的RMS小于0.5宽巷波长(43cm),利用它几乎可以确定所有的宽巷周跳。在实际 计算中,采用递推的方法计算每一历元b6值及其残差误差σ:
比较相邻历元b6值及其残差误差σ,可以判断是否发生周跳。若发生周跳,则标记出发生周跳的历元,把此历元之前的数据作为一个数据弧段,并计算其 b6均值及其残差误差σ,从下一个历元重新开始计算探测周跳,重复上述工作直到数据结束。弧段与弧段的周跳大小Δb6可以由两段之间的均值求得,并且 Δb6与L1和L2周跳具有如下关系:
![]()
![]()
在完成利用Melbourne_wubbena组合观测值确定所有宽巷周跳Δb6后,可以利用电离层变化的平滑性特点,采用Geometry_free 组合修复窄巷周跳的大小。一般是取宽巷周跳发生前的N个历元数据拟合一个多项式,再取周跳发生后的N个历元数据拟合另一个多项 式,两个多项式在周跳发生历元时刻的差值可认为是窄巷周跳的大小,即可确定λ1Δn1-λ2Δn2的大小。再利用


式(11),可求出Δn1、Δn2的值。
(2)利用双频观测值消除电离层延迟
一般的电离层模型改正精度只有dm级,不能满足非差精密定位的要求。另外,利用站间差分消除或减弱电离层影响的方法也不适用于非差定位。由于进行精密单点定位作业一般都采用双P码双频接收机,故可利用双频观测值消除电离层延迟,其改正精度可达cm级。
(3) 相位平滑伪距观测值
伪距作为辅助观测值,在精密单点定位初始阶段仍然起主要作用,伪距观测值质量的好坏将对初始化时间、非差整周模糊度的确定产生影响。因此,为提高伪距观测的精度,一般利用已清除了周跳的消除电离层延迟影响的相位观测数据对伪距进行平滑。
3、结果分析
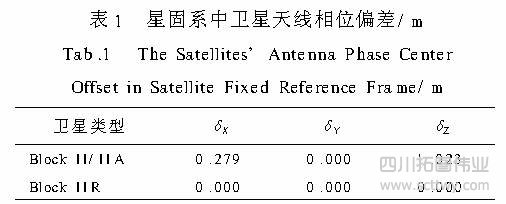
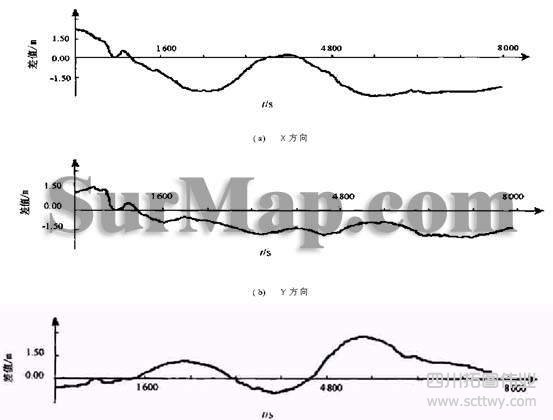
在实例计算中,采用IGS精密星历,利用笔者开发的精密单点定位软件处理了位于美国夏威夷的IGS跟踪站KOKB站2000年226d的数据。单点 定位计算的观测值可采用伪距、相位平滑伪距和非差相位等多类观测值。为了比较利用不同观测值进行精密单点定位的结果,实例分别采用相位平滑伪距和非差相位 观测值进行计算。利用非差相位进行精密单点计算时,为了能够更快地确定相位整周模糊度,仍然将伪距作为辅助观测值参与处理,只是非差相位观测值赋予较高的 权,伪距观测值赋予较低的权。取P码伪距的观测噪声为1m,相位观测值的观测噪声为0.01周。为了便于分析,将IGS公布的KOKB站的高精度ITRF 坐标作为已知值,分别将不同观测值的定位结果与已知值进行比较。图1表示利用相位平滑伪距观测值计算的结果与测站已知坐标在X、Y、Z方向上的差值;图2 表示初始阶段利用非差相位观测值计算的结果与测站
知坐标在X,Y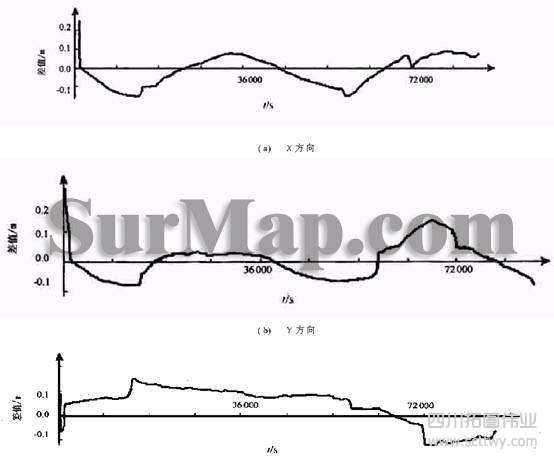
Z方向上的差值;图3表示利用非差相位观测值计算的单历元结果与测站已知坐标在X、Y、Z方向上的差值。
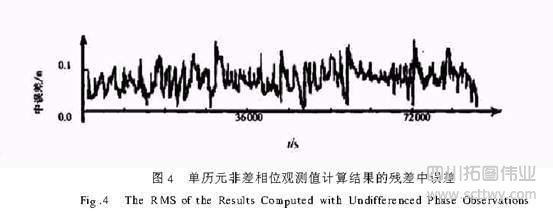
分析图1中的结果可以得出,利用相位平滑伪距观测值定位的精度只能达到m级,显然不能满足较高精度的应用需求,但是利用它能确定非差相位整周模糊度 的初始值。而利用非差相位观测值定位,在初始阶段,由于相位的整周未知数无法确定,定位结果很大程度上依靠伪距观测值的质量,精度较差。但随着观测数据的 不断增多,可以较准确地确定整周未知数,定位的精度也显著提高。目前,以笔者的算法和软件,非差相位精密单点定位的初始化时间约为15min。初始化完成 后,单历元定位结果的精度较稳定,定位结果与已知坐标在X、Y、Z方向的差均小于20cm,与已知坐标X、Y、Z方向及点位的最大差值分别为 0.158m、0.174m、0.167m。分析图4可得,单历元定位的残差中误差在绝大部分时间均小于20cm。由图3结果可知,单历元的解算结果中仍 然存在系统性的偏差,其原因可能是误差改正模型不够精确。对于静态情况,可以通过延长观测时间的办法部分地消除其影响,达到提高定位精度的效果。在今后的 研究工作中,将精化其误差改正模型,以得到更好的定位结果。
结论与建议
利用本文描述的相位非差精密单点定位方法,单台双频双P码接收机即可在全球范围内进行精密定位。与GPS相对测量相比,此方法具有不受观测时间、观 测距离限制的优点。可以预见,相位非差单点精密定位是将来GPS定位发展的一个重要方向,具有极大的应用潜力。实验结果表明,当初始化完成后,其单历元的 静态定位精度在X、Y、Z方向均可优于20cm,这一精度与国际同类研究相比是一致和相当的。由于目前所考虑的误差模型不够精确,可能会给结果带来系统性 误差。在今后的工作中还必须对各类误差模型进一步精化,消除其影响。另外,相对于静态定位,动态定位的观测模型及随机模型更复杂,而动态的精密单点定位技 术也更具有应用价值(例如低轨卫星的定轨),因此,动态的精密单点定位技术将是以后研究的主要内容。
信息标题:GPS非差相位精密单点定位技术
本文地址:http://www.mapping178.com/zhichi-1296.html
阅读本文的人还看过:
与“GPS非差相位精密单点定位技术”有关联的产品:



- 上一篇:激光雷达与激光测距
- 下一篇:GIS型GPS接收机在土地利用数据库变更中的应用